|
Listen to this article
 |
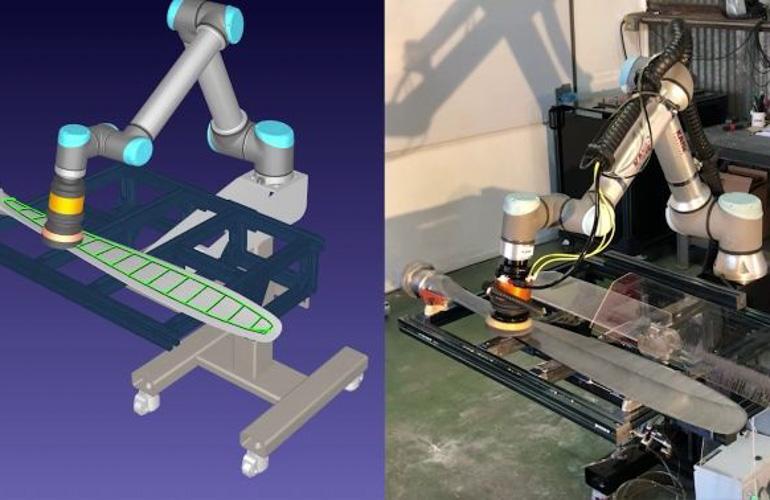
Robot simulation (left) and physical robot (right) programmed using the RoboDK API for Matlab. | Credit: RoboDK
The RoboDK API for Matlab enables robot programmers to develop programs and simulate the motions using Matlab code. This API provides the tools to work offline using Matlab. The program can then be run on a simulated robot to check its validity before running on a physical robot.
Matlab is a powerful programming environment that provides the functions to calculate complex paths, kinematics, and other high-level mathematic operations. RoboDK is a powerful and cost-effective simulator for industrial robots and robot programming.
RoboDK supports more than 700 robots and more than 50 robot manufacturers, including robots like ABB, Fanuc, Yaskawa, Universal Robots, Motoman, Staubli, and more.
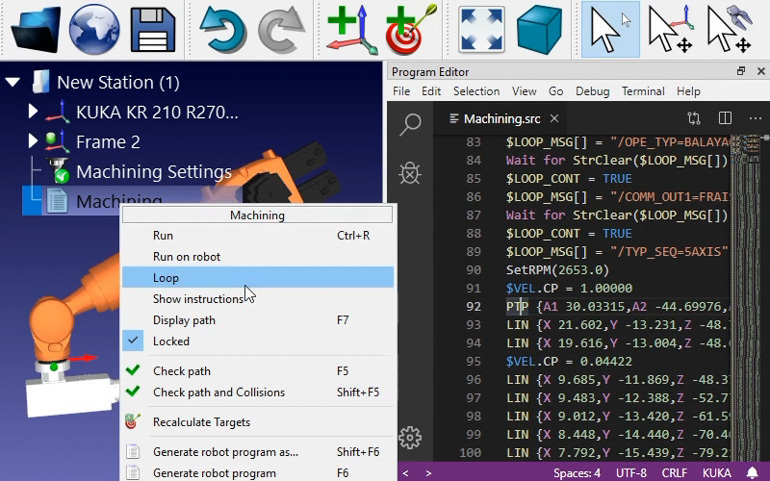
RoboDK is a robust simulation and offline programming tool. | Credit: RoboDK
There are two primary classes provided by the RoboDK API for Matlab:
- The Robolink class is the link between RoboDK and Matlab. Any item from the RoboDK station can be retrieved.
- The RobolinkItem class is where RoboDK items are represented by the RobolinkItem class. An item can be a robot, a reference frame, a tool, an object, a program or a specific project.
RoboDK is widely applicable to various applications, such as robot machining, material handling, polishing, welding, synchronizing multiple robots or pick and place.
To get started, download the latest version of the Matlab API is available from GitHub:
The primary features of the RoboDK API for Matlab are the following:
- Simulate and program any robot arm (industrial robots or cobots)
- An intuitive user interface to create robot programs
- Automated generation of robot programs
- API for interfacing with MATLAB and other languages
- Import CAD files (such as STEP, IGES, STL) to use in your project




Tell Us What You Think!